માનવ સંસાધન વિકાસ મંત્રાલય
IIT ગાંધીનગરના સંશોધકોએ ફ્લેક્સિબલ કન્ટિન્યુઅમ રોબોટ્સ માટે નવતર કંટ્રોલ ફ્રેમવર્ક પ્રસ્તાવિત કર્યું, જે સર્જિકલ રોબોટિક્સ અને ઔદ્યોગિક ઓટોમેશનમાં તેમની સંભાવનાઓને ખોલશે
સંશોધકોએ ટેન્ડન-ડ્રિવન કન્ટિન્યુઅમ રોબોટ્સ (TDCRs) માટે વર્ચ્યુઅલ એક્ટ્યુએશન સ્પેસ (VAS)ની વિભાવના પ્રસ્તાવિત કરી
આ ફ્રેમવર્ક ગણતરીની માંગમાં નોંધપાત્ર ઘટાડો કરી શકે છે, ટ્રેકિંગની ચોકસાઈમાં સુધારો કરી શકે છે અને મલ્ટી-સેક્શન રોબોટ્સને નિયંત્રિત કરવાની જટિલતા ઘટાડી શકે છે
આ પદ્ધતિની માપનીયતા (Scalability) લઘુત્તમ આક્રમક સર્જિકલ પ્રક્રિયાઓ અને એરક્રાફ્ટ એન્જિન જેવી મર્યાદિત જગ્યાના નિરીક્ષણ જેવી એપ્લિકેશન્સમાં સંભાવનાઓ ખોલી શકે છે
प्रविष्टि तिथि:
30 MAR 2026 4:48PM by PIB Ahmedabad
ઇન્ડિયન ઇન્સ્ટિટ્યૂટ ઓફ ટેકનોલોજી ગાંધીનગર (IITGN) ના સંશોધકોએ ટેન્ડન-ડ્રિવન કન્ટિન્યુઅમ રોબોટ્સ (TDCRs) માટે વર્ચ્યુઅલ એક્ટ્યુએશન સ્પેસ (VAS) ની વિભાવના પ્રસ્તાવિત કરી છે. આ ફ્રેમવર્ક રોબોટના બહુવિધ વિભાગોને સરળતાથી હેન્ડલ કરી શકે છે, ગણતરીની માંગમાં નોંધપાત્ર ઘટાડો કરી શકે છે અને ટ્રેકિંગની ચોકસાઈમાં સુધારો કરી શકે છે. તેમનું તારણ તાજેતરમાં 'રોબોટિકા' (Robotica) માં પ્રકાશિત થયું હતું.
આપણે ઘણીવાર રોબોટ્સની કલ્પના મજબૂત હાથ, ફરતા સાંધા અને લક્ષિત યાંત્રિક હલનચલન ધરાવતા મશીનો તરીકે કરીએ છીએ. જોકે, આવા રોબોટ્સ મર્યાદિત અને સાંકડી જગ્યાઓમાં કામ કરવામાં અસમર્થ હોય છે. માનવ શરીરની અંદર સર્જરી કરવાનો વિચાર કરો. નાજુક અંગો અને નરમ પેશીઓની હાજરીને કારણે તે પડકારજનક હોઈ શકે છે. સખત રોબોટ્સ નુકસાન પહોંચાડ્યા વિના આવી જગ્યાઓ પર નેવિગેટ કરી શકશે નહીં, કારણ કે તેમને હલનચલન કરવા માટે મોટા છિદ્રોની જરૂર પડશે.
ભીડવાળી જગ્યાઓમાં અસરકારક રીતે નેવિગેટ કરવા માટે ફ્લેક્સિબલ બોડી ધરાવતા કન્ટિન્યુઅમ રોબોટ્સ (CRs) નો પ્રવેશ થાય છે! ટેન્ડન-ડ્રિવન કન્ટિન્યુઅમ રોબોટ (TDCR) એ CR નો એક પ્રકાર છે જે તેની કોમ્પેક્ટ, હળવા વજનની ડિઝાઇન, ચોકસાઈભર્યા નિયંત્રણ અને ખર્ચ-અસરકારકતા માટે જાણીતો છે. તેમાં પાતળા વાયરો (ટેન્ડન - સ્નાયુબંધ જેવી રચના) હોય છે જે તેને વિવિધ દિશાઓમાં સરળતાથી અને સચોટ રીતે વળવામાં મદદ કરે છે. ટેન્ડન એક ફ્લેક્સિબલ બેકબોન (કરોડરજ્જુ જેવી રચના) સાથે જોડાયેલા હોય છે, અને જ્યારે ખેંચવામાં આવે છે, ત્યારે જરૂરી ગતિ બનાવવા માટે પ્રાણીઓના અંગોની નકલ કરતા હોય તેવું લાગે છે.
જોકે, TDCR ને લગતી આગાહીઓ પડકારજનક છે. "જ્યારે એક સખત રોબોટમાં મર્યાદિત સંખ્યામાં સાંધા હોઈ શકે છે જે તેની હિલચાલને મર્યાદિત કરે છે, ત્યારે TDCR અસંખ્ય રીતે વળી શકે છે. તેના બહુવિધ વિભાગો દ્વારા પરિસ્થિતિ વધુ જટિલ બને છે," એમ મિકેનિકલ એન્જિનિયરિંગ વિભાગના એસોસિયેટ પ્રોફેસર ડૉ. મધુ વડાલીએ સમજાવ્યું હતું, જેઓ IITGN રોબોટિક્સ લેબના સહ-વડા છે.
IITGN ના સંશોધકો દ્વારા પ્રસ્તાવિત VAS આ સમસ્યાને ઉકેલવા તરફનું એક પગલું છે. તે રોબોટના ભૌતિક ટેન્ડનોને સીધા નિયંત્રિત કરવાને બદલે રોબોટની ગતિના સરળ પ્રતિનિધિત્વની કલ્પના કરે છે અને તેના વ્યક્તિગત વિભાગોના સ્વતંત્ર નિયંત્રણને સક્ષમ કરે છે. આ વિશેષતા મલ્ટી-સેક્શન રોબોટ્સને નિયંત્રિત કરવાની જટિલતા ઘટાડે છે.
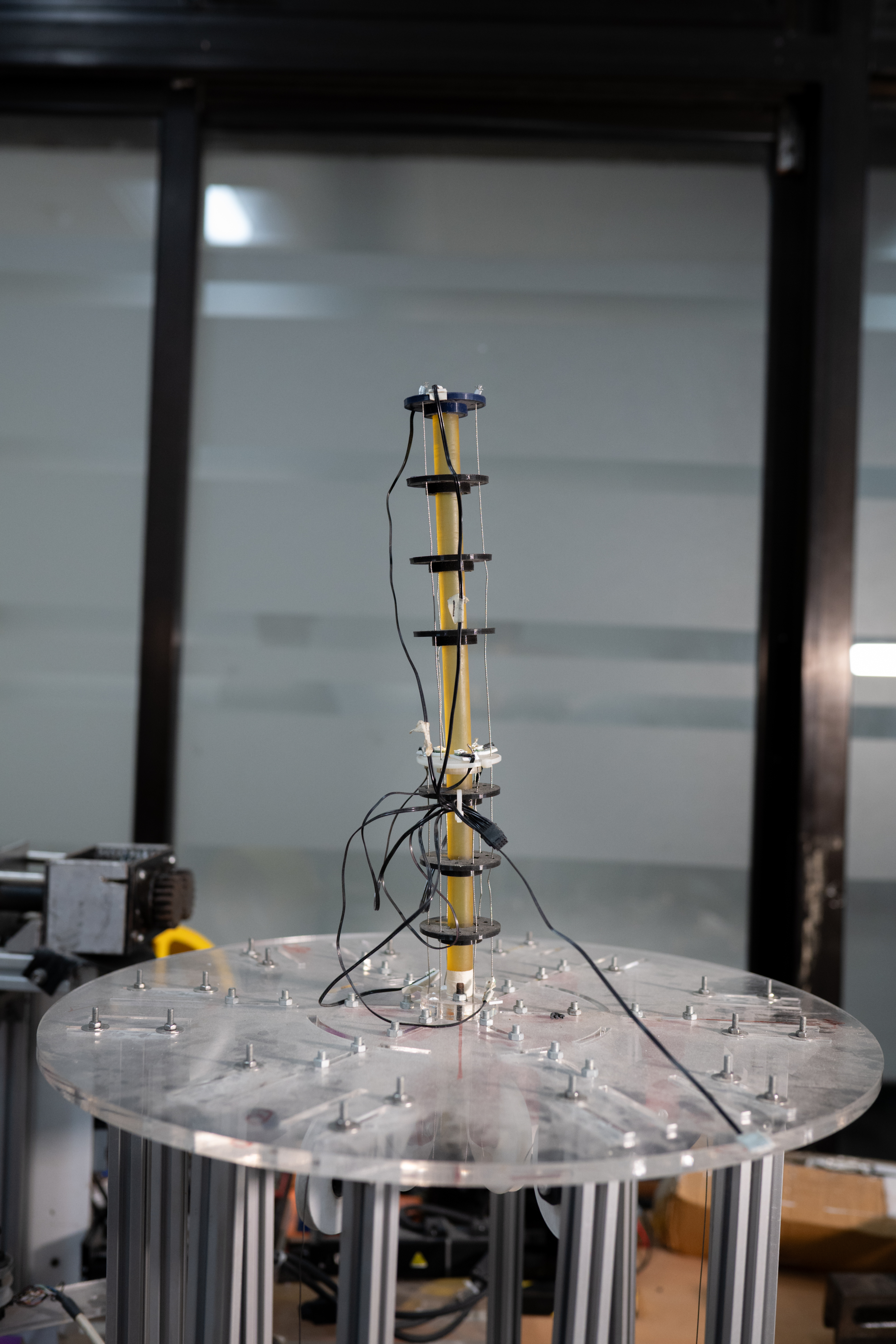
મોહમ્મદ મોદસ્સીર ફિરદૌસ અને ડૉ. શૈલ જાદવના જણાવ્યા મુજબ, “આ પદ્ધતિની અસરકારકતાનો અંદાજ કાઢવા માટે, અમે છ ટેન્ડન ધરાવતા બે વિભાગોવાળો એક રોબોટિક હાથ વિકસાવ્યો છે. નાના LED માર્કર્સે કેમેરાને રોબોટની સ્થિતિ ટ્રૅક કરવાની મંજૂરી આપી. બાદમાં, કમ્પ્યુટરે વાસ્તવિક સ્થિતિની રોબોટની ઇચ્છિત સ્થિતિ સાથે તુલના કરી અને તે મુજબ જોડાયેલ મોટર્સને એડજસ્ટ કરી."
જ્યારે શ્રી ફિરદૌસ મિકેનિકલ એન્જિનિયરિંગ વિભાગના પીએચડી સ્કોલર છે, ત્યારે ડૉ. જાદવ તે જ વિભાગના ભૂતપૂર્વ પીએચડી સ્કોલર છે. હાલમાં, તેઓ વિયેનાની ટેકનિકલ યુનિવર્સિટીમાં પોસ્ટડોક્ટરલ રિસર્ચ ફેલો છે.
પ્રાયોગિક કાર્યોમાં હિલચાલ માટે ભૂલનું માર્જિન એક ટકા કરતા ઓછું હતું, જે નોંધપાત્ર ચોકસાઈ દર્શાવે છે. વધુમાં, રોબોટના બે વિભાગો પરિસ્થિતિના આધારે સ્વતંત્ર રીતે કાર્ય કરી શકે છે. તેને વધુ સારી રીતે સમજવા માટે, પોતાના કાંડાને સીધું રાખીને આંગળીઓ હલાવવાની અને પછી તેનાથી વિપરીત કરવાની કલ્પના કરો.
ટૂંકમાં, VAS ફ્રેમવર્ક TDCR ની સચોટતામાં નોંધપાત્ર સુધારો કરી શકે છે. આ પદ્ધતિની માપનીયતા વધારાના વિભાગો ધરાવતા TDCR સુધી વિસ્તરે છે, જે સર્જરી, ઔદ્યોગિક ઓટોમેશન અને એરક્રાફ્ટ એન્જિન જેવા મર્યાદિત-જગ્યાના નિરીક્ષણો જેવી વ્યવહારુ એપ્લિકેશન્સ માટે દરવાજા ખોલે છે.
આ અભ્યાસ ભારતની 'નેશનલ સ્ટ્રેટેજી ઓન રોબોટિક્સ' સાથે સુસંગત છે, જેનો ઉદ્દેશ્ય 2030 સુધીમાં ભારતને રોબોટિક્સમાં વૈશ્વિક લીડર તરીકે સ્થાપિત કરવાનો છે. તે 'મેક ઇન ઇન્ડિયા 2.0' પર આધારિત છે, જેણે વૈશ્વિક મૂલ્ય શૃંખલામાં દેશના જોડાણને વધારવા માટે રોબોટિક્સને પેટા-ક્ષેત્ર તરીકે ઓળખાવ્યું હતું. ડૉ. વડાલીના શબ્દોમાં, “IITGN માં, અમે રોબોટિક્સની આસપાસ એક ઉત્સાહી અને આકર્ષક સંસ્કૃતિ બનાવી છે. રોબોટિક્સ એવું ક્ષેત્ર બની રહ્યું છે જ્યાં જિજ્ઞાસા અત્યાધુનિક અને સામાજિક રીતે સુસંગત નવીનતા તરફ દોરી જાય છે."
સંશોધકોએ આ કાર્ય સંબંધિત પેટન્ટ (નંબર 202421002550) ગવર્મેન્ટ ઓફ ઇન્ડિયાના ઓફિસ ઓફ ધ કંટ્રોલર જનરલ ઓફ પેટન્ટ્સ, ડિઝાઇન્સ એન્ડ ટ્રેડ માર્કસમાં ફાઇલ કરી છે. તેઓએ નાણાંકીય સહાય પૂરી પાડવા બદલ ગુજરાત કાઉન્સિલ ઓન સાયન્સ એન્ડ ટેકનોલોજીનો આભાર માન્યો હતો. તેઓએ IITGN રોબોટિક્સ લેબ ટીમ તરફથી મળેલા પ્રતિસાદનો પણ સ્વીકાર કર્યો હતો.
(रिलीज़ आईडी: 2246934)
आगंतुक पटल : 59
इस विज्ञप्ति को इन भाषाओं में पढ़ें:
English